

Microgripper
The microgripper shown here consists of a monolithic device comprising two shape memory microactuators of NiTi, which are pre-strained with respect to each other and thus work as an antagonistic system. One microactuator is designed as a bending actuator. The second microactuator consists of a folded beam structure for linear actuation. By selective heating the bending actuator, the linear actuator is deflected and, at the same time, the gripping jaws are opened (state a). By selective electrical heating the linear actuator, the bending actuator is deflected, while the gripping jaws are closed (state b).
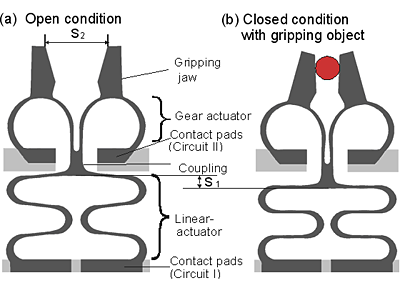 |
Schematic of a microgripper consisting of a monolithic shape memory device with several functional units such as gripping jaws, gear and linear actuator |
Microgrippers of thickness 100 µm reach a maximum gripping force of 15 mN and a maximum displacement of 200 µm. Such microgrippers are of interest, e.g., for “pick-and place“ applications in micro assembly.
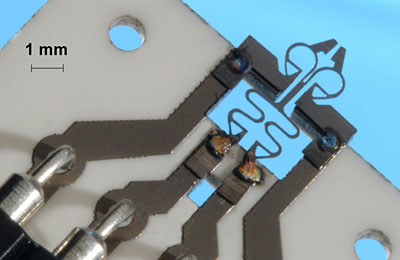 |
Microgripper of NiTi |
|
Detailed view of a microgripper of NiTi, whose gripping jaws are position controlled via a light barrier. Download video: MP4 format, 6.7 MB |
Further information:
- M. Kohl, B. Krevet and E. Just, SMA microgripper system, Sensors and Actuators A 97-98 (2002) 646-652