

 b)
b)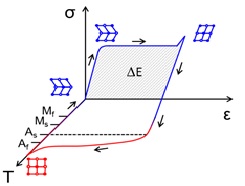
 b)
b) 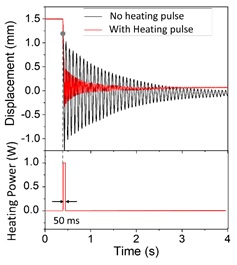
 b)
b)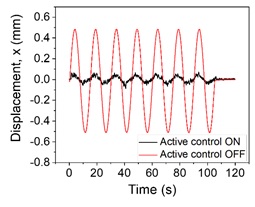
Microdamping
We develop novel shape memory alloy (SMA) film damper devices using the dissipative mechanisms of either the pseudoelastic effect or one-way shape memory effect. These effects result in a nonlinear stress-strain response and hysteresis allowing the engineering and control of dissipative processes at large stress and strain levels up to 500 MPa and 5%, respectively. Owing to the large surface-to volume ratio of SMA films rapid heat transfer leads to time constants in the millisecond regime. This enables a new generation of smart miniature damper systems for portable or mobile applications combining noise- and jerk-free operation.
Shape memory effects
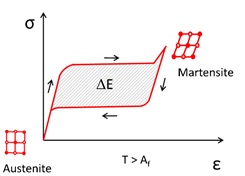
The damping operation of SMAs is based on energy dissipation during phase transformation under loading. In pseudoelastic SMA, the device material exists in austenite state under stress-free condition (Fig. 1a). Upon loading, the material transforms to martensite state. The material transforms back to austenite upon unloading. In this cyclic operation, owing to the phase transformation, a large part of loading energy is dissipated as heat. This principle is utilized to develop passive microdampers.
One-way SMA is in unoriented martensite state at room temperature under stress-free condition. The orientation of martensite occurs upon loading. The material retains its deformed shape after loading, dissipating most of the loading energy. The shape recovery occurs when heating the material above austenite finish temperature (Af). The material comes back to the unoriented martensite state when the temperature is below martensite finish temperature (Mf). This unique behavior of one-way SMA is utilized to develop active microdampers.
a)b)
Fig 1. Uniaxial cyclic loading behaviour of superelastic (a) and one-way material (b). Legends: As, Af - austenite start, finish; Ms, Mf - martensite start, finish.
Microdampers
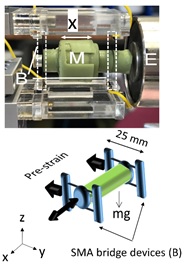
SMA microdevices, designed as bridge structures, are micromachined from a shape memory alloy foil and connected to a proof mass (Fig. 2a) to develop microdampers. Shock loading is provided using an electromagnet. By applying a heating pulse as shown in Fig. 2b, the mass oscillation is counteracted by the recovery force of the one-way SMA bridge device, whereby the amplitude and the settling time of the oscillations are reduced. Up to 90% of the loading energy can be dissipated in the first cycle of oscillation.
a) b)
Fig. 2: Shock loading setup of one-way SMA bridge devices (a) and the mass oscillation behavior upon activating SMA devices. Legend: B - SMA bridge device, M - Mass, E – Electromagnet.
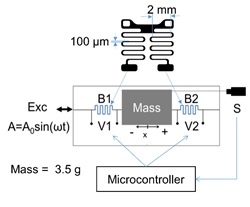
Active Vibration Control
SMA foil actuators have high actuation force to mass ratio suitable to stabilize a proof mass against vibrations. Fig. 3a shows a high stroke folded-beam actuator to stabilize a proof mass against harmonic loading. A sinusoidal harmonic excitation is provided using an external linear actuator. A closed-loop position feedback controls the heating pulse for the folded-beam actuators. This approach stabilizes the mass by reducing the vibration by 83% (Fig. 3b).
a) b)
Fig. 3: Schematic of active vibration control using two SMA folded beam actuators (a) and the mass stabilization using closed loop control of the actuators (b).
Funding
This Research is funded by DFG in the framework of the priority program SPP - 1897 ‘Calm, Smooth and Smart: Novel Approaches for Influencing Vibrations by Means of Deliberately introduced Dissipation’.An overview of the project is illustrated in the video below.