

Origami-inspired microactuator systems
Our activities are focused on investigating the design, microfabrication, and performance of coupled Shape Memory Alloy (SMA) folding microactuators, with the aim of enabling Origami-inspired re-programmable microactuator systems. These systems consist of many microscale tiles connected by SMA microactuators, which are homogenous at the human length scale. This technology should enable the reversible formation of various 3D shapes on demand and, thus, adaptive performance in a changing environment opening up potential applications in fields such as robotics and medicine.
Antagonistic microactuators for folding and unfolding based on SMA films offer a high torque density and favorable scaling properties. Origami-inspired SMA microactuator systems are fabricated using clean room technology and UV lithography. Utilizing local Joule heating, each SMA microactuator can be shape-set and controlled. State-of-the-art mechanical equipment is used to characterize torque and angle of the microactuators as well as thermal cross-coupling effects. In order to overcome limitations in the folding range, the shape-setting of the microactuators and novel microactuator folding designs are investigated. Additional switchable latching mechanisms are integrated to reversibly lock and unlock the microactuators at their maximum folding position to enable bistability.
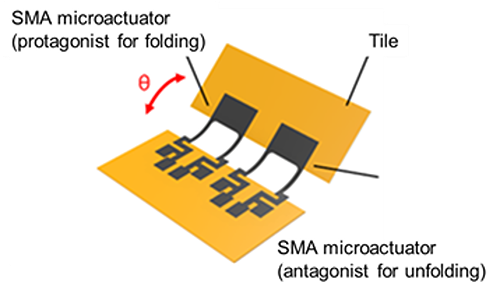 |
Fig.1: Single unit of an Origami-inspired SMA microactuator system consisting of an antagonistic pair of SMA microactuators for bi-directional folding and unfolding and two polymer tiles. |
|
|
|
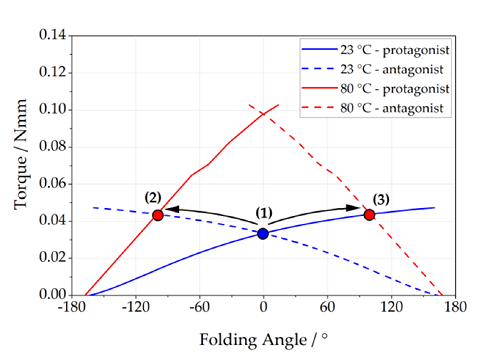
Fig.2: Torque versus folding angle of an antagonistic pair of SMA microactuators. Selective heating of the protagonist/antagonist causes folding to end position 2/3 giving rise to a maximum folding range of ±100°. |
Publication list
- V. Gottwald, L. Seigner, M. Ohtsuka, and M. Kohl, “Origami-Inspired Bistable SMA Microdevice,” presented at the SMST 2024, ASM International, May 2024, pp. 74–75. doi: 10.31399/asm.cp.smst2024p0074.
- L. Seigner, V. Gottwald, L. Bumke, E. Quandt, and M. Kohl, “Enhanced Bi-Directional SMA Actuation of Origami-Inspired Microstructures,” in MikroSystemTechnik Kongress 2023; Kongress, Oct. 2023, pp. 820–824. Accessed: Jan. 14, 2025. [Online]. Available: https://ieeexplore.ieee.org/abstract/document/10483138
- G. K. Tshikwand, L. Seigner, F. Wendler, and M. Kohl, “Coupled Finite Element Simulation of Shape Memory Bending Microactuator,” Shap. Mem. Superelasticity, vol. 8, no. 4, pp. 373–393, Dec. 2022, doi: 10.1007/s40830-022-00396-9.
- L. Seigner, G. K. Tshikwand, F. Wendler, and M. Kohl, “Bi-directional origami-inspired sma folding microactuator,” Actuators, vol. 10, no. 8, p. 181, Aug. 2021, doi: 10.3390/ACT10080181/S1.
- L. Seigner, O. Bezsmertna, S. Fähler, G. Tshikwand, F. Wendler, and M. Kohl, “Origami-Inspired Shape Memory Folding Microactuator,” 2020. doi: 10.3390/iecat2020-08480.
Funding/ Projects
This project is part of the DFG Priority Program “KOMMMA”, which bundles the research of 18 Principal Investigators over 6 years. Objectives of this interdisciplinary program are to show up new methods and concepts to understand the complex coupling and synergy effects in coupled microactuator systems as well as to fabricate platforms for cooperative and/or multistage microactuator systems. LINK: https://www.spp-kommma.de/24.php
Contact
- Vincent Gottwald [Contact]